Jenis-jenis Robot Perindustrian6 min read
Dalam era perindustrian hari ini, teknologi robot menjadi satu teknologi penting. Robot dan perindustrian tidak boleh dipisahkan lagi sejak mulanya revolusi perindustrian ketiga. Dengan adanya teknologi PLC (Programmable Logic Controller), mikropengawal dan mikropemproses membolehkan jurutera memprogram robot untuk mengautomatikkan proses dalam industri seperti pengimpalan, pembungkusan, pemasangan dan pemeriksaan. Penggunaan robot dapat meningkatkan efisiensi dan produktiviti selain melindungi pekerja daripada pekerjaan yang berulang, membosankan dan berbahaya. Apakah jenis-jenis robot yang digunakan di dalam perindustrian?
Dalam skop yang lebih besar, terdapat beberapa jenis robot iaitu, robot pengguna, robot pendidikan, robot humanoid, robot perubatan dan robot perindustrian. Artikel kali ini akan menerangkan jenis-jenis yang terdapat dalam kelas robot perindustrian untuk sesiapa yang ingin mengetahui tentang penggunaan robot di dalam perindustrian ataupun jika anda seorang pengilang kecil yang ingin mengembangkan kilang anda.
Robot Bersendi (Articulated Robot)
Jenis robot ini yang sering terbayang jika kita bercakap tentang robot industri kerana robot ini kerap dilihat di dalam kilang-kilang industri berat seperti kilang kereta. Robot bersendi didefinisikan sebagai robot yang mempunyai sendi berputar. Sendi ini juga dipanggil sebagai sendi revolut. Sendi berputar tersebut biasanya digerakkan oleh servo motor. Robot jenis ini diklasifikasikan mengikut berapa jumlah paksi putaran yang ada. Jenis yang paling biasa adalah 6-paksi. Terdapat juga robot bersendi 4 paksi dan tujuh paksi.
Robot bersendi boleh melakukan tugas dalam ruang satah yang tidak selari. Ini bermaksud ianya juga mampu mencapai ruang yang mempunyai halangan seperti ruang dalaman kereta. Kecanggihan robot menyebabkan harganya juga lebih mahal berbanding robot yang lain. Kelebihan robot jenis ini adalah darjah kebebasannya yang tinggi. Namun, robot jenis ini tidak sesuai di dalam aplikasi kelajuan tinggi kerana kinematiknya yang rumit dan jisim komponen yang berat. Aplikasi robot bersendi adalah seperti robot pemasangan, robot kimpalan dan robot CNC.

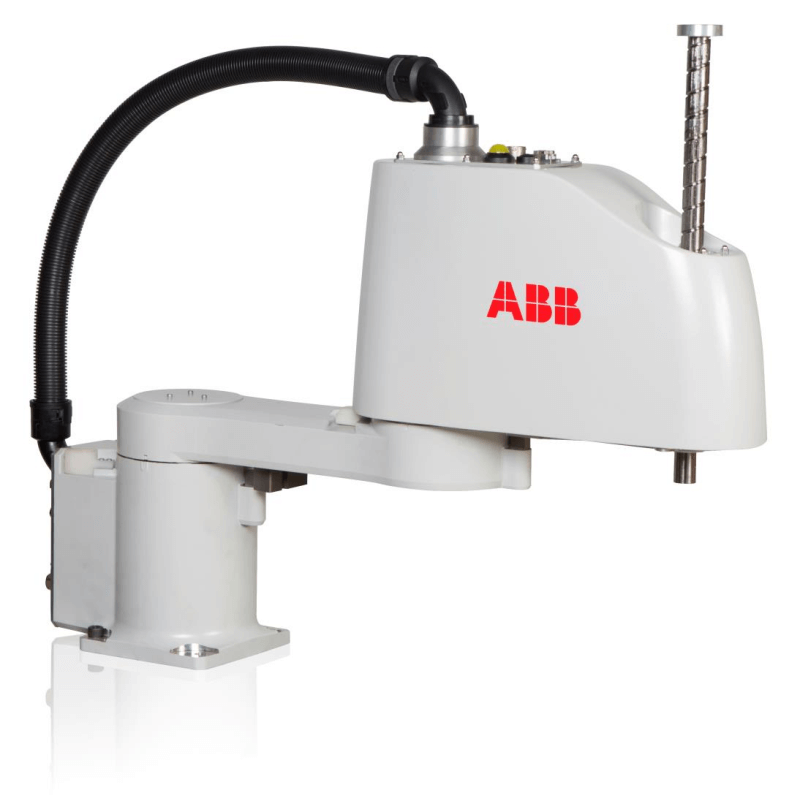
Robot SCARA
SCARA adalah singkatan kepada Selective Compliance Robot Arm. Bermaksud, robot SCARA boleh bergerak dalam paksi X-Y dan tegar pada paksi Z. Robot SCARA menjadi pilihan jika pemain industri ingin memerlukan robot yang beroperasi dalam dua satah yang selari, contohnya, memindahkan komponen dari satu konveyor ke konveyor yang lain. Selain itu, robot SCARA juga bagus dalam aplikasi pemasangan vertikal seperti memasukkan pin kerana kekuatan dalam garis vertikal yang ada pada robot ini.
Melakukan tugas berulang dalam keljuan tinggi adalah salah satu kelebihan yang terdapat dalam robot SCARA. Oleh itu, robot jenis ini sering digunakan dalam aplikasi ‘pick and place’ seperti dalam pemasangan komponen pada papan elektronik telefon pintar dan sebagainya. Salah satu kekangan yang ada pada robot SCARA adalah kepayahan untuk beroperasi dalam ruang yang mempunyai halangan seperti bahagian dalaman.
Robot Delta
Konsep asas robot delta adalah penggunaan lengan segi empat-selari (parallelogram) yang menghadkan pergerakan platform hujung hanya pada pergerakan translasi, iaitu pergerakan dalam koordinat X, Y atau Z tanpa putaran. Robot delta menggunakan tiga motor yang dilengkapkan dibahagian atasnya. Disebabkan tiada motor diletakkan dibahagian lengan robot, bahagian lengannya boleh diperbuat daripada bahan berkomposit yang ringan.
Lengannya yang ringan membolehkan robot ini mempunyai inersia yang rendah, justeru membenarkan robot delta berfungsi dalam kelajuan dan pecutan yang tinggi. Aplikasi robot delta adalah dalam aplikasi pembungkusan kerana kelajuannya yang tinggi dan robot pembedahan kerana ketepatannya.

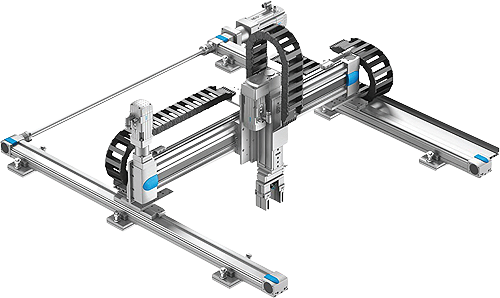
Robot Cartes (Cartesian Robot)
Di sekolah, kita belajar sistem koordinat Cartes yang membolehkan kita memberi koordinat pada sebuah satah. Robot ini beroperasi menggunakan sistem koordinat tersebut oleh itu diberikan nama ‘Cartesian Robot’. Robot Cartes biasanya terdiri daripada tiga penggerak linear (atau motor) yang disusun dalam keadaan serenjang (perpendicular) supaya lengan robot boleh bergerak dalam koordinat Cartes X, Y dan Z.
Komponen yang digunakan pada robot Cartes ini adalah komponen standard yang mudah didapati seperti stepper motor dan linear railing. Sistem kinematiknya juga tidak serumit robot bersendi dan delta. Oleh sebab itu, robot jenis ini mampu dibina pengemar DIY. Robot Cartes selalunya digunakan dalam aplikasi mesin CNC, pencetak 3D dan juga robot ‘pick and place’. Kelemahan yang ada pada robot ini adalah ia sukar untuk mencapai ruang yang sukar. Juga, sliding rail yang terbuka membuatkan robot jenis ini tidak sesuai dalam persekitaran yang berhabuk.
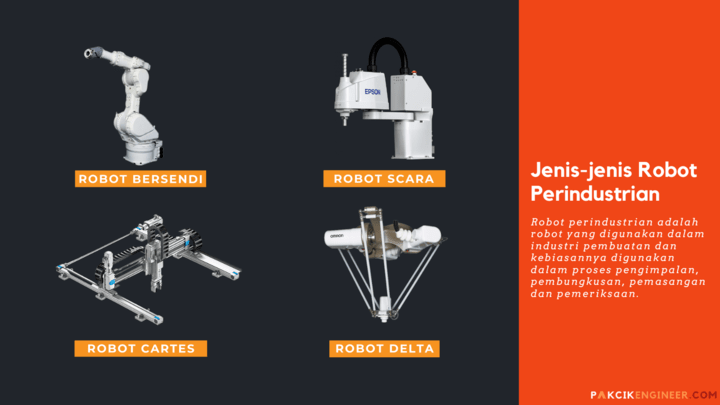
Konklusi
Kita telah pun belajar jenis-jenis robot yang digunakan di dalam perindustrian. Secara ringkas, terdapat empat jenis robot perindustrian yang kita telah bincangkan iaitu robot bersendi (articulated robot), robot SCARA, robot delta dan robot Cartes. Masing-masing terdapat kelebihan dan kelemahannya tersendiri dari segi keupayaan dalam aplikasi berkelajuan tinggi, saiz dan kecanggihan.

1 thought on “Jenis-jenis Robot Perindustrian6 min read”